
Référence: 59-07378

Garanties sécurité

Livraison gratuite à partir de 300dt

Ouvert tous les jours de 8:30h à 18h
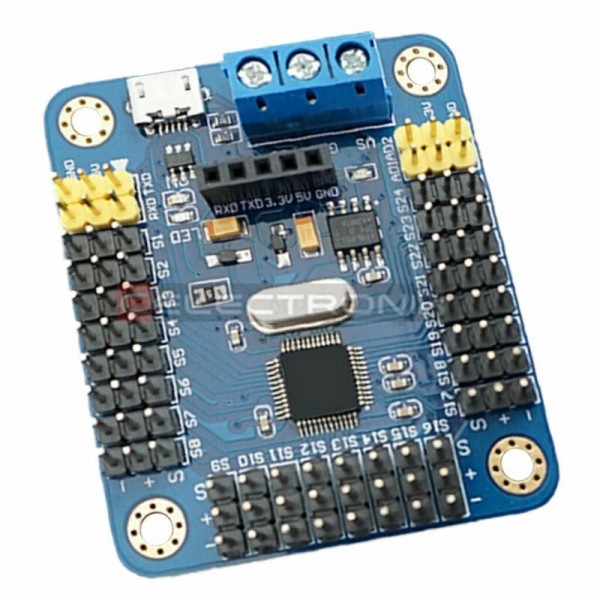
Caractéristiques :
PWM à fréquence réglable jusqu'à environ 1,6 KHz
Résolution 12 bits pour chaque sortie - pour les servos, cela signifie une résolution d'environ 4us à un taux de mise à jour de 60 Hz
Push-pull configurable ou sortie à drain ouvert
La broche d'activation de sortie pour désactiver rapidement toutes les sorties
Bornier pour entrée d'alimentation
Protection contre les inversions de polarité sur l'entrée du bornier
LED verte bonne puissance
Connecteurs à 3 broches par groupes de 4 pour pouvoir brancher 16 servos à la fois
Conception chaînable
Un endroit pour placer un gros condensateur sur la ligne V +
Résistances série 220 ohms sur toutes les lignes de sortie pour les protéger et pour rendre les LED de pilotage triviales.
Cette carte / puce utilise une adresse I2C 7 bits entre 0x60-0x80, sélectionnable avec des cavaliers.
Le forfait comprend:
1 x pilote PWM / servo 12 bits 16 canaux

Référence: 59-06409






Référence: 59-01206
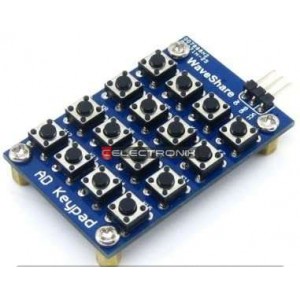
LCD4884 LCD Joystick Shield Development Module Nokia 5110 SPI Port

Référence: 59-03884
input voltage is 4.2~40V output voltage is1.25V~37V output current can be as high as 3A

Référence: 59-06396
input voltage is 4.2~40V output voltage is1.25V~37V output current can be as high as 3A






 Waveshare
Waveshare Arduino
Arduino